























华为云INSPIRE创想者大会在上海西岸会展中心成功举办,华为公司董事、华为云CEO周跃峰重磅发布:全球首个全流程具身智能开发平台 - CloudRobo正式面世,将于6月30日开启公测,凌云光·元客视界作为具身智能全栈数采合作伙伴入驻该平台。

CloudRobo:把机器人开发从“自建算力”变成“云端租用”
当前,具身智能开发面临三座大山:缺数据、算力贵、仿真难。CloudRobo的核心思路,正是将机器人开发从“每家自建算力”转向“云端按需租用”。
平台三大核心能力:
- PB级安全可信数据底座
- 业界首个云原生具身模型生产引擎
- 全国产Real-Sim数据生产及模型评测体系
效率数据一目了然:
- 机器人上云 - 小时级
- 模型部署 - 分钟级
- 开箱即用数据集达百万级,外加20+昇腾亲和模型
CloudRobo不是帮你造机器人,而是帮你“训练”机器人:在云端完成最烧钱的数据和算力环节。

平台有了,算力有了,模型有了……数据从哪来?
CloudRobo解决了算力和仿真难题,但具身智能有一个更根本的卡点:高质量的真实物理交互数据极度匮乏。
真实场景中的人、物、环境的交互数据稀缺,直接导致模型泛化能力差、仿真到现实的迁移效果不佳。
谁来提供这些数据?
元客视界构建“以人为中心”的高精度数据闭环,为CloudRobo筑牢数据“粮仓”
当前,具身智能产业正面临规模化应用的核心卡点,光学运动捕捉技术是唯一能够在全流程中实现毫米级精度的多模态数据采集方式,正成为具身智能从研发到量产不可或缺的基础设施。

“以人为中心”的数据新范式
传统“机器人为中心”的遥操作数据采集模式成本高、本体依赖性强、跨平台复用困难,难以支撑复杂任务的规模化训练。为此,凌云光·元客视界提出“以人为中心”的RoboGene机器人多模态数据采集创新范式:通过高精度多视点立体视频、运动捕捉与多模态力学传感(精度达0.1毫米/0.1牛),构建包含三维几何与力学反馈的真实交互数据,大幅降低真机采集成本,提升数据质量与跨本体泛化能力。目前,已采集高质量多模态数据超1000小时,致力于为行业共建具身智能“数据粮仓”。
4DGS+基础模型:高效率仿真与实时渲染
为解决传统仿真缺乏物理真实感与时序连贯性的问题,元客视界基于4D高斯泼溅(4DGS)与VGGT 3D基础模型,实现了单场景亚厘米级重建(每场景少于5分钟)、峰值信噪比PSNR超过30dB的照片级渲染以及82FPS的实时交互,支持连续时序动态场景生成。其数据策略采用“小样本精炼+大规模扩展”路线:先以约1万条高精度人类示范数据训练工业具身智能基础模型,再生成百万级合成仿真数据,实现高质量与高规模的兼得。

三“高”数据采集基础设施:高质量、高模态、高效率
要让机器人具备人类一样的通用运动能力,需要万小时量级的数据规模;而在细分垂类场景下,数据体量则要达到几十万甚至上百万小时。光学动捕技术能够在全流程实现毫米级精准捕捉,同时保证高效率的海量数据采集。
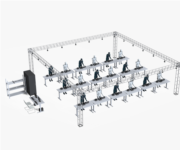
元客视界率先推出了多用户分区数据采集系统,打造出高质量、高模态、高效率的工业化采集基础设施,产出的多模态数据支持自动清洗和标注,并能实现多场景并行作业,大幅提升了数据采集的生产力。
凌云光·元客视界的光学运动捕捉技术正在具身智能的研发、生产到场景应用的全链条中扮演不可替代的角色,我们将持续以高精度、高效率的数据采集能力,为机器人产业筑牢数据“粮仓”,当好“运动裁判”,助力具身智能从实验室走向真实的工业与生活场景。








