























无人机、无人车、人形机器人、机械臂、仿生机器人、灵巧手等智能体在制造业、采矿业、物流业、农业和服务业等行业应用越来越广泛,对智能体高精度空间轨迹、位姿定位测量仪器的需求也越来越大
动作捕捉系统在智能体科研应用场景中作为智能体空间轨迹和物理量测量科学仪器使用。将智能体的空间轨迹和物理量数据采集后传输到各种科研软件中,用于分析、校准和优化智能体控制算法,提升智能体控制的编组能力、避障能力和控制精度
行业需求分析
智能体位姿定位研究需要在不同的环境下精确定位和追踪不同大小、不同种类的无人设备,并提供包括空间坐标和六自由度等多种物理量真值,用于控制和路径规划算法优化
- 确保数据流的畅通无阻与高效分析
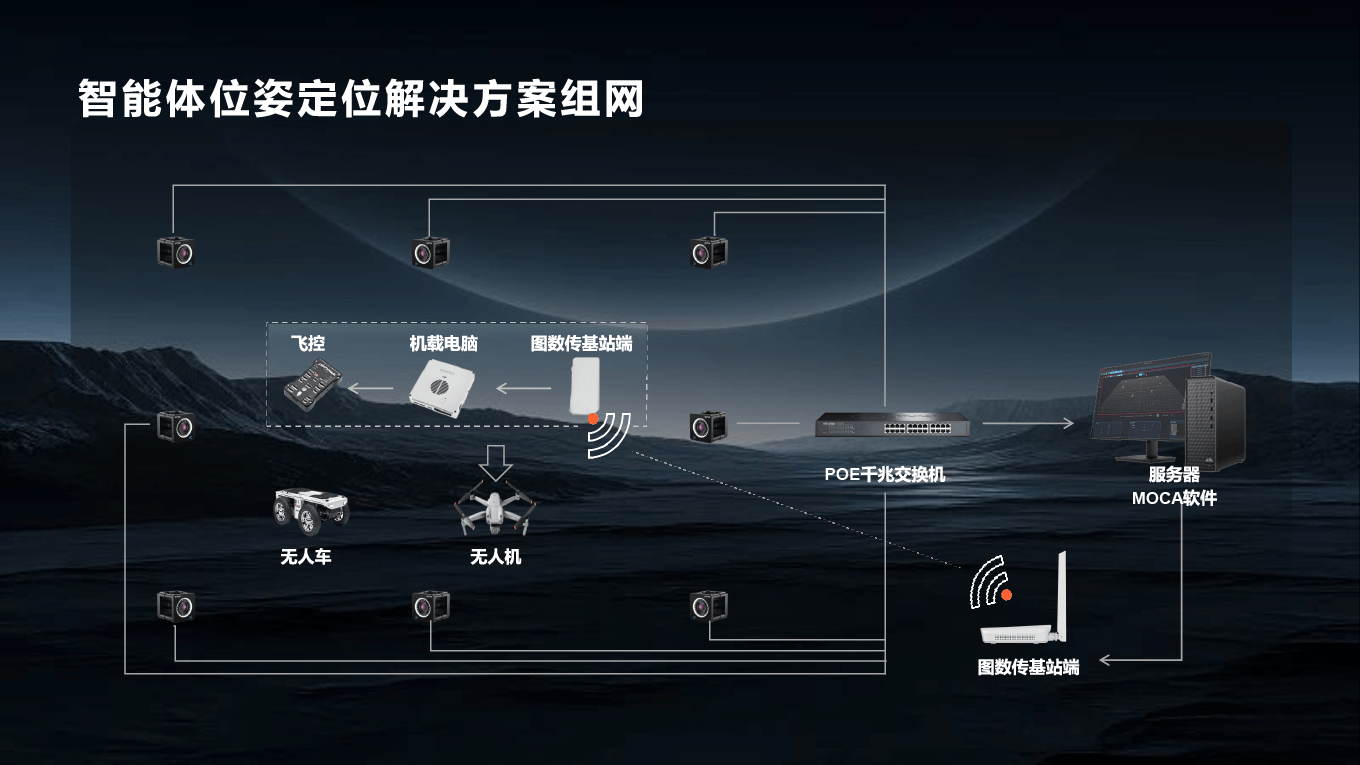
- 系统需与主流无人系统、机器人平台及科研软件无缝对接,确保数据流的畅通无阻与高效分析,对加速科研成果的验证、优化与应用推广具有重要意义。
- 支持多种数据传输协议
- 提供全面且易于集成的软件开发工具包(SDK),满足多样化科研需求、促进二次开发与创新。
- 智能体种类繁多、形态各异
- 在研究中对其轨迹追踪、定位精度及稳定性提出了极高标准。任何细微的误差或环境因素的轻微干扰,都可能严重削弱仿真模型的准确性,进而危及控制算法的精确性与仿真成果的可靠性。
- 在无人机、无人车等集群作业场景中
- 系统需具备同时追踪、定位与识别多个目标的能力。这要求系统不仅要有高效的资源分配策略,还要能实时精准地处理多目标间的交互与协同,确保整体作业的高效与安全。
- 智能体研究应用场景广泛且复杂
- 需跨越室内、水下等多种极端试验场地,这对系统的环境适应性及稳定性提出了严峻挑战。
- 智能体研究平台应追求操作简便、使用直观
- 降低科研人员的学习成本,让更多人能够轻松上手并专注于核心算法的研发与优化。

方案优势
FZMotion智能体位姿定位解决方案可以提供

-
01广泛的兼容性与数据分析便利FZMotion支持与MATLAB、DEWESOFT、ROS、Crazywarm等各类科研应用平台对接。

-
02灵活的数据传输与二次开发支持支持TCP、ZMQ、VRPN、UDP等多种协议,支持用户基于SDK进行二次开发。

-
03用户友好与低学习门槛FZMotion软件操作友好,支持客户个性化图形化界面设置,支持一键多刚体创建及自定义数据导出,相机自动标定,简单易操作。

-
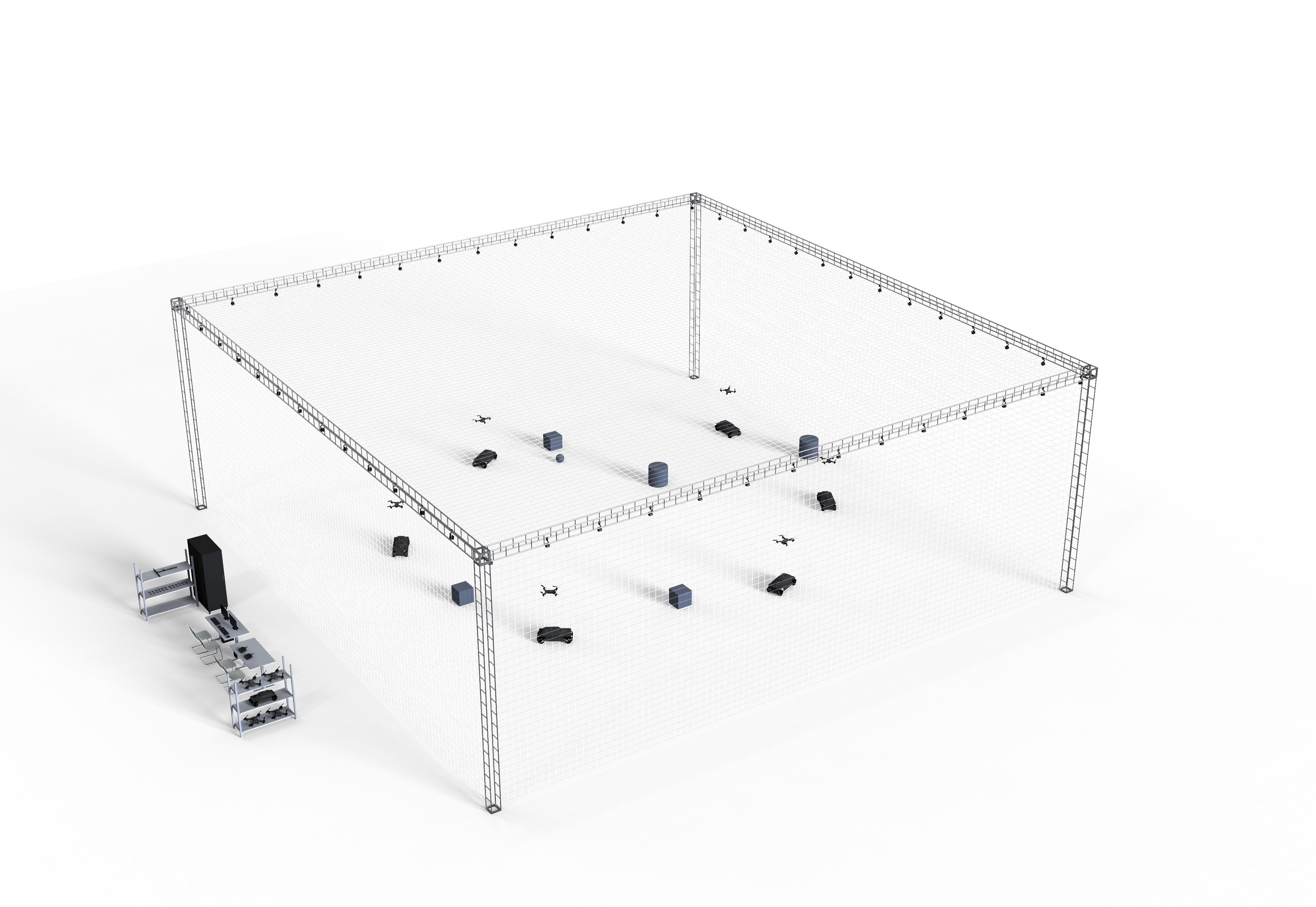
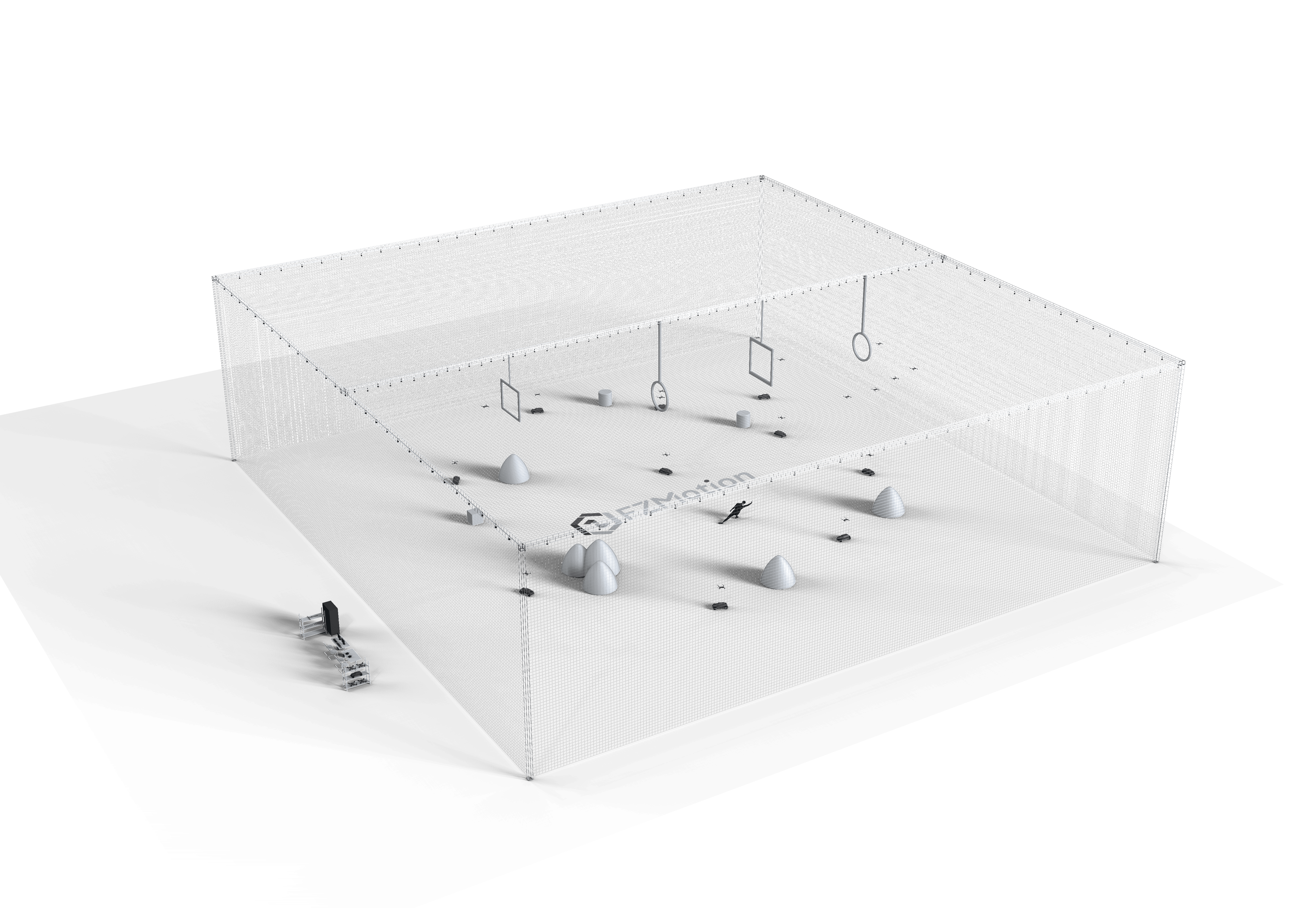
04广泛的环境适应性和稳定性支持室内各种大小空间、水下等试验场地,一次标定稳定使用30天以上,建设成本低,维护成本低。系统最大可支持超2500㎡的超大空间无人机无人车追踪场景。

-
05复杂场景下的多目标协同控制FZMotion可支持超200+多目标同步捕捉,优于激光跟踪仪。

-
06亚毫米级的定位精度准确定位识别各种形态无人机、无人车、机器人的实时位置及运动信息,定位精度可达0.02毫米。
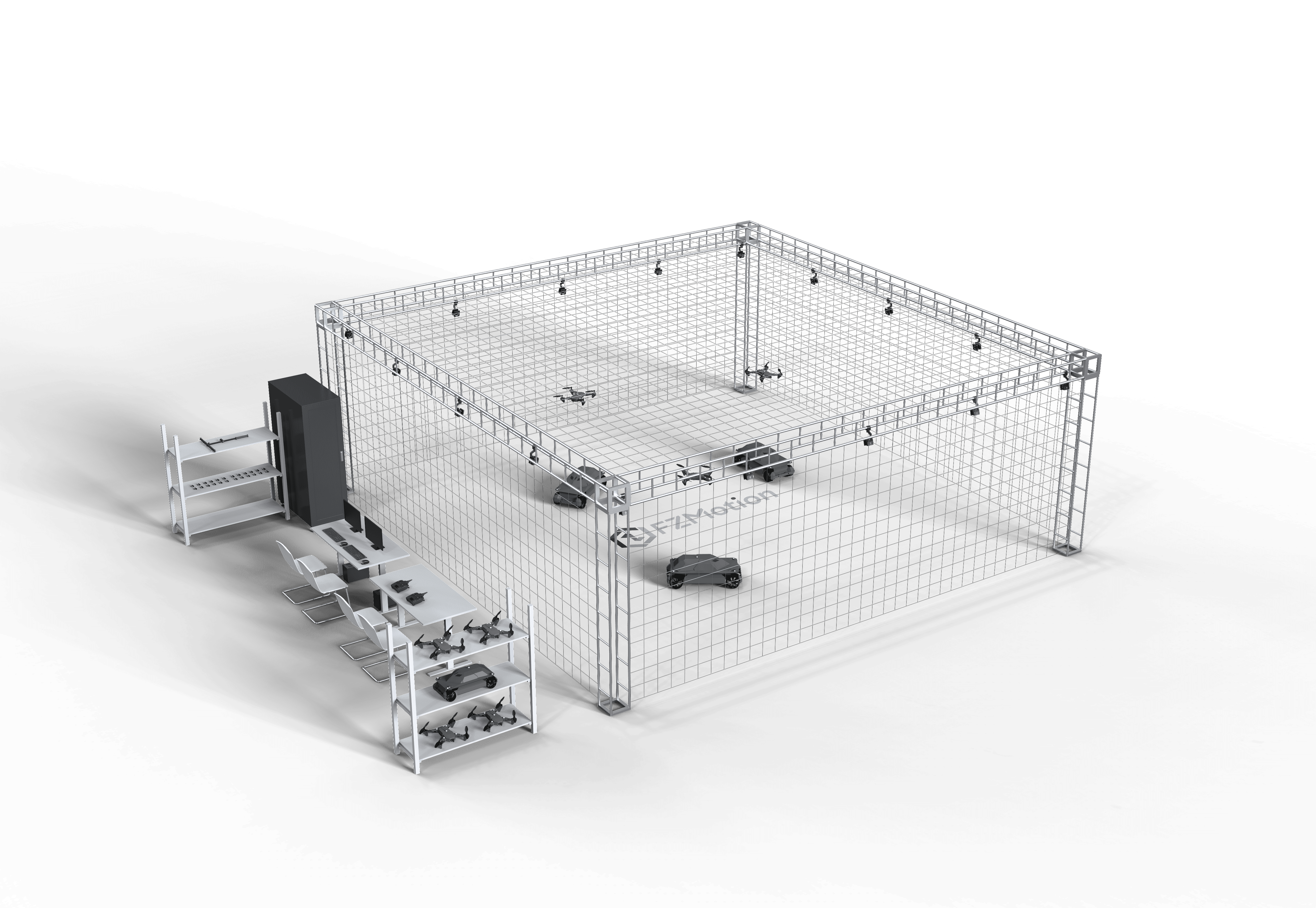
典型配置推荐
选择覆盖范围
-
- 小型空间
- 8m*8m
-
- 大型空间
- 20m*20m
-
- 超大型空间
- 50m*50m
-
- 规格大小
- 8m*8m
-
- 相机型号
- Swift30A
-
- 相机数量
- 12-24台

-
定位精度
(0.05mm/m)

-
目标物数量
(30+)

-
覆盖范围
(64㎡-144㎡)
面向小型空间无人机/无人车追踪场景
-
- 规格大小
- 20m*20m
-
- 相机型号
- Swift120A
-
- 相机数量
- 32-48台
-
定位精度
(0.05mm/m)
-
目标物数量
(50+)
-
覆盖范围
(144㎡-400㎡)
面向大型空间的无人机/无人车追踪场景
-
- 规格大小
- 50m*50m
-
- 相机型号
- Swift120A
-
- 相机数量
- 80-200台
-
定位精度
(0.05mm/m)
-
目标物数量
(200+)
-
覆盖范围
(900㎡-2500㎡)
面向超大型空间的无人机/无人车追踪场景
经典场景案例



-
北京理工大学小型仿生机器鼠SQuRo在研制仿生机器鼠的过程中,需要对机器鼠的俯仰角、弯曲角、弯曲距离等动作姿态数据进行分析,以量化指标评估机器鼠性能。
元客视界通过搭建了2mx2m的紧凑空间,采用9台光学动作捕捉相机,精确地对机器鼠的头部、背部、腿部、尾部等重要测试部位进行追踪。

-
哈尔滨工业大学水黾仿生机器人哈尔滨工业大学闫继宏教授团队将水黾和蜂鸟这两种仿生对象相结合,提出一种可以实现水面扑翼飞行的仿生微型机器人。
为了准确评估不同驱动力下该机器人的飞行效果,团队引入了元客视界FZMotion高精度运动捕捉系统,继而通过三组不同扑动频率的水面飞行实验,成功捕捉并清晰展现了机器人在扑翼过程中动作及姿态的变化情况,这一技术使得观察和分析机器人的运动轨迹更加直观和精确。
-
西北工业大学六旋翼无人机定位研究55无人机室外定位现阶段最常用的定位方式为GPS或北斗卫星定位系统。由于天气原因和星位的不固定,在室外进行无人机进行定位实验需要花费仿人时间和人力成本巨大,成效甚低。西北工业无人机实验室的老师转而尝试在室内进行无人机定位研究,为其提供了亚毫米级的精准无人机室内定位。

-
大连理工海岸近海国重实验室水下物体变形测量








