























国内最早开始布局具身智能的研究与市场应用落地
国内全链路机器人基础设施供应商
重要里程碑:
· 国内第一家用动捕技术实现遥操作,联合宇树最早打通人形机器人遥操作解决方案
· 国内首个光学动捕实现身外化身全身实时遥操作解决方案
· RoboGene成功服务某头部互联网企业的国内首个海量数据采集项目,业内高精度多模态数据开荒者
· 相继落地4个代表性测试训练场(北京市石景山人形机器人训练中心、苏州市人形机器人创新中心、杭州市人形机器人中试基地、湖南省具身智能创新中心)
· RoboMaster助-“众擎”首个实现后空翻机器人的开发,“宇树”春晚节目应用,支撑多支队伍在2025世界人形机器人运动会上展现实力
· RoboMetrics-智元第5000台量产下线
行业需求分析
宇树、智元、众擎...都在用的机器人数据基石,如何制造批量满级机器人,构建高精度、多模态的数据采集环境,让机器人通过“人类示教”的方式,高效获取真实、可训练、可复用的动作数据,显著提升训练效率与数据质量。
在“动作学习”层面,通过元客视界业内首发的双足机器人小脑采集训练方案,对人类长序列复杂动作的精准捕捉与映射,结合模仿学习与强化学习框架,帮助机器人逐步形成自己的“运动小脑”,并在真机上完成验证。
在“动作学习”层面,通过元客视界业内首发的双足机器人小脑采集训练方案,对人类长序列复杂动作的精准捕捉与映射,结合模仿学习与强化学习框架,帮助机器人逐步形成自己的“运动小脑”,并在真机上完成验证。
- RoboMaster
- 高精度数据采集训练系统,将捕捉到的人体长序列复杂动作,精准映射至机器人URDF模型,再通过深度学习算法优化运动轨迹与关节角度解算。在这一过程中,我们采用“模仿学习引导 + 强化学习优化”的先进框架训练机器人运动小脑,有效突破了长序列动作的泛化性限制。通过仿真训练结合监督微调,最终让机器人实现“站稳不摔跤、动作更类人”的敏捷运动能力,并成功部署至真机验证。
- RoboGene
- 通过元客自研的数据采集管理平台,原始数据经过清洗、标注与筛选,转化为高质量数据集,为机器人大脑研究提供支持,实现从采集到应用的端到端闭环管理。该平台可支撑年产千万条工业级数据集,使单条数据采集成本下降90%,为行业的大规模模型训练奠定了坚实的基础。
- RoboMetrics
- 作为机器人质量检测系统,能在15分钟完成160+项测试,对于不同本体构型,能实现2-3周快速适配,每一个细节都转化为可量化的数据指标,基于多维度运动参数分析,整机性能与核心零部件评估,为运动控制算法优化、机械结构改进、出厂质量评估提供高质量数据支撑,构建机器人出厂检测和性能评估标准。






方案优势
FZMotion具身智能解决方案可以提供
-
01人形机器人运动评测方案• 评测指标多样化:支持整机性能、核心零部件、关键运动数据、动作精度、关节灵活度、姿态稳定性、步态偏差等评估;
• 多型号评测对象创建:基于专用评估模块,可以创建出针对不同型号机器人的检测形态,并独立选择感兴趣评测指标与标准值范围,一键分析生成报告;
• 多工位同时检测&SDK:通过CS分布式架构,一套系统可以同时满足多个工位的机器人检测,每个工位互不干扰;提供SDK开发包。

-
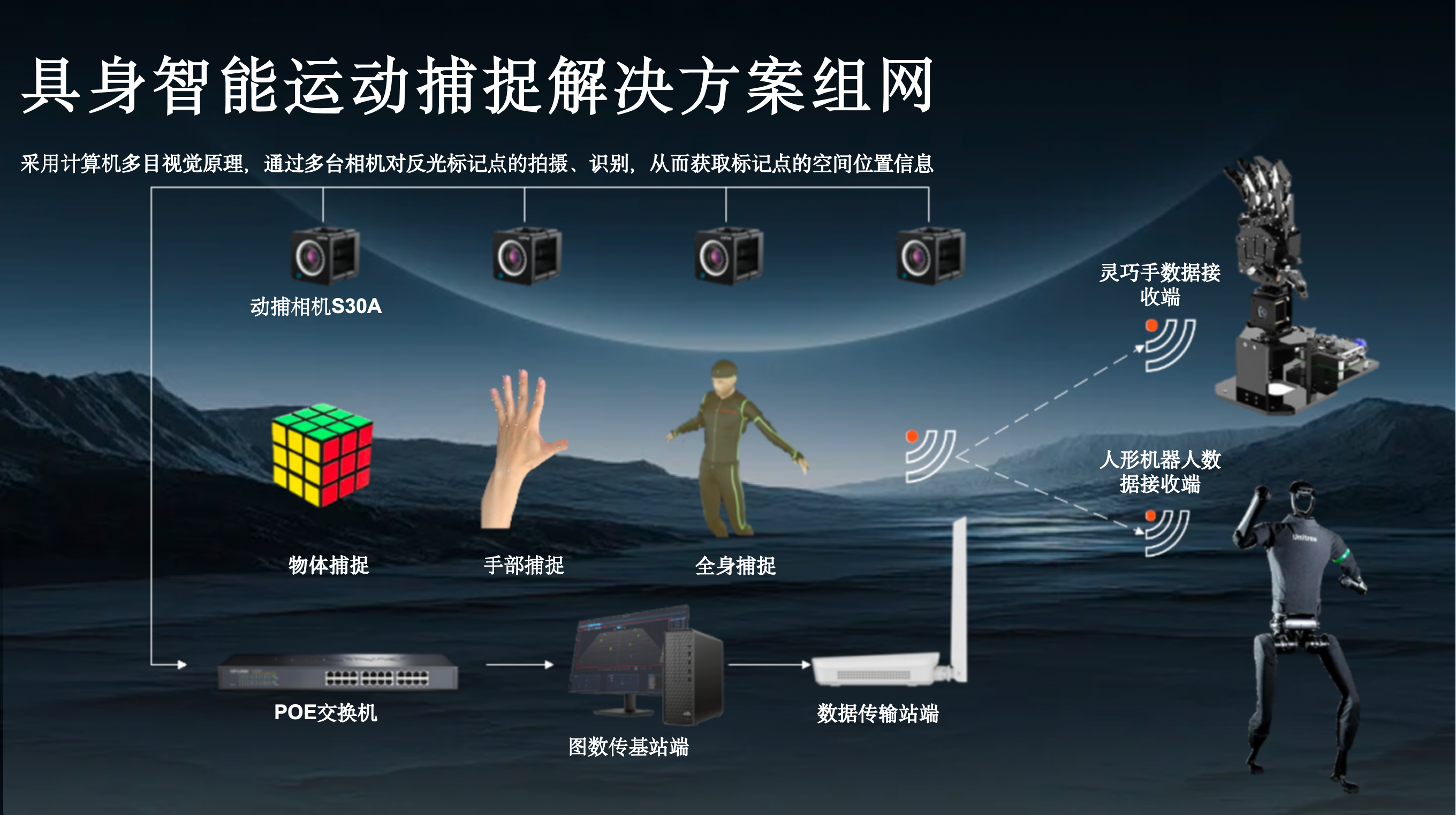
02VLA多模态训练数据采集方案• 集群式控制:一套系统可追踪多个工位采集员,所有数据分配到多个采集终端,实现数采场集群控制能力;
• 多模态数据同步采集:包括人类、机器人关节重定向目标数据、机器人关节数据、IMU、视觉、声音、深度图、点云、力传感(内部六维传感、触觉、力台等)等模态数据;
• 数据管理与用户管理:集成用户管理、任务管理、数据管理(数据验收、入库、标注等)等。
-
03小脑训练数据采集方案• 一键采集多种动作:可以采集多种武术、舞蹈动作,可保存为原始数据与模型训练所需数据类型
• 一键生成序列化文件:针对采集的不同数据,根据预配置一键生成动作的序列化存储格式(pkl等),实现快速导入模型进行训练
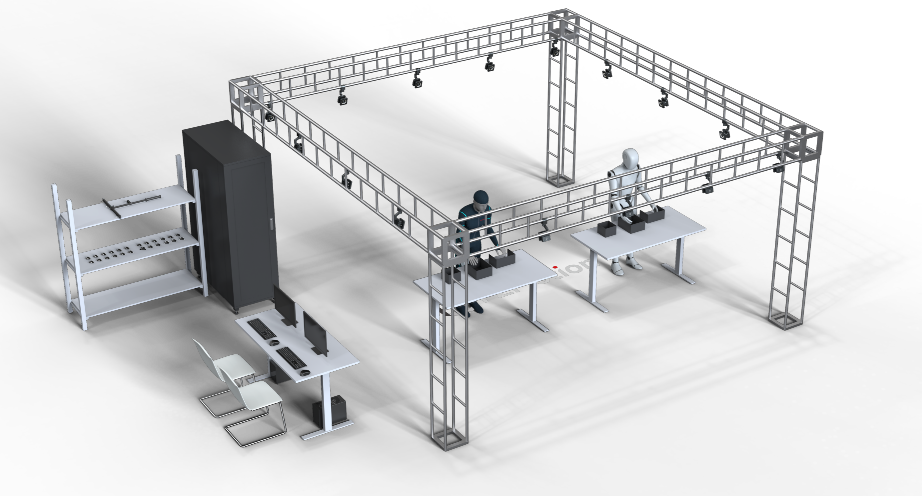
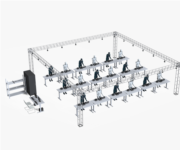
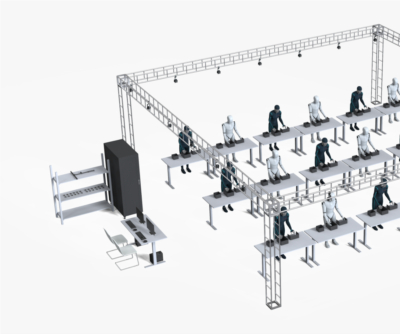
典型配置推荐
选择覆盖范围
-
- 紧凑型空间
- 5*5
-
- 规格大小
- 5*5
-
- 相机型号
- Swift30AW
-
- 相机数量
- 8-12台

-
定位精度
(0.05mm/m)

-
目标物数量
(10+)

-
覆盖范围
(25㎡-50㎡)
面向人形机器人具身智能及仿生机器人运动研究场景
经典场景案例

-
北京建筑大学2025年世界人形机器人运动会在2025年世界人形机器人运动会上,由北京建筑大学通用智能机器人训练场与元客视界组建的“驰稳”战队,采用FZMotion高精度动捕采集+模仿强化学习,训练不满1个月情况下,斩获最佳人人气奖!








