


























详情概述
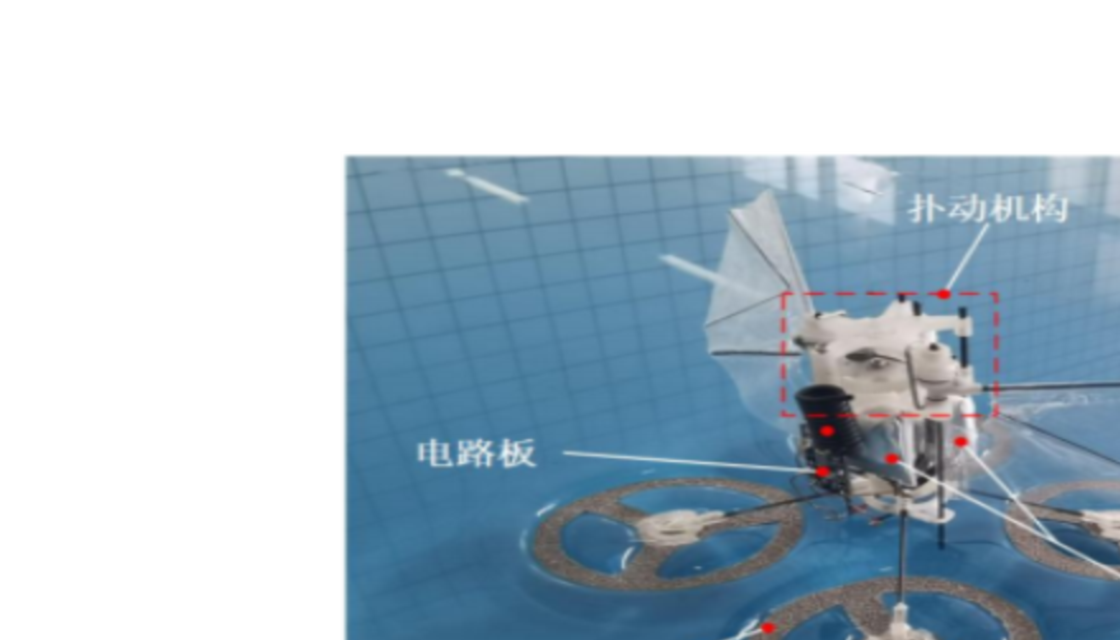
事件:微型水面扑翼仿生机器人
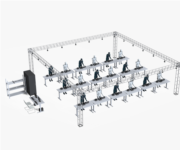
技术:FZMotion智能体追踪技术
产品:FZMotion
应用描述
在机器人结构仿生设计环节,研究院团队通过归纳总结确定了以和这两种仿生对象相结合的目标机器人。;采用疏水性材料;同时,在保证支撑力的前提下以减小支撑脚重力和拖拽力为目标,设计了水面支撑机构。
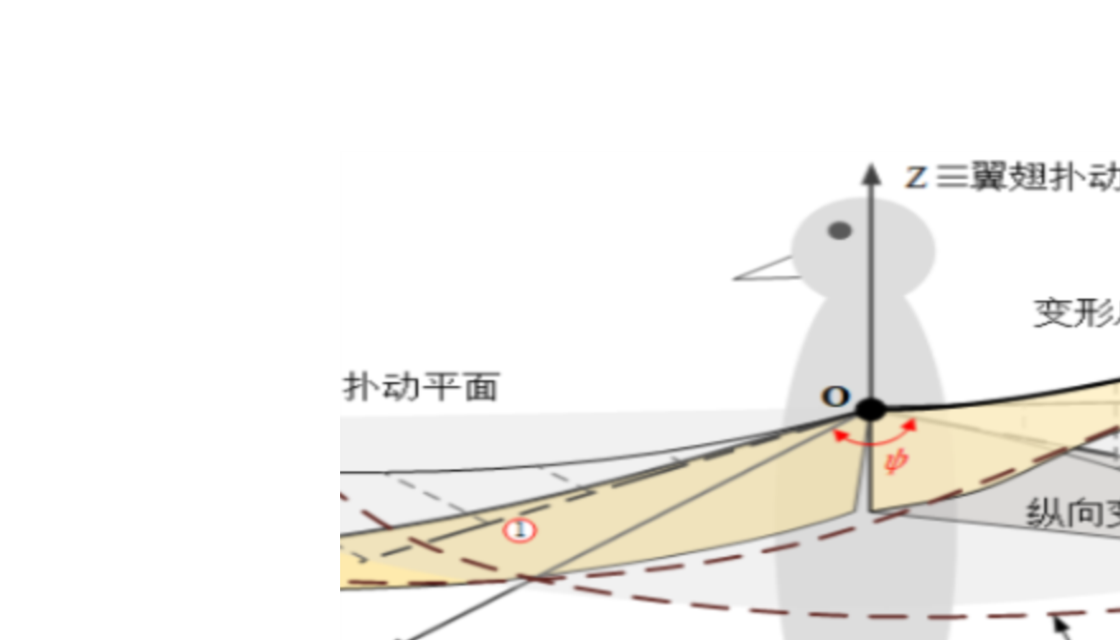
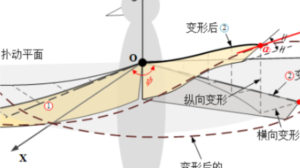
柔性翼扑动空气动力学模型制备微型水面扑翼飞行机器人样机,基于水面-空气环境下的,采用 Adams 和 Matlab 联合动力学仿真方法验证了水面扑翼飞行机器人的性能。
高精度运动捕捉技术成功捕捉并清晰展现了机器人在扑翼过程中动作及姿态的变化情况,这一技术使得观察和分析机器人的运动轨迹更加直观和精确。
是元客视界自主开发的运动捕捉采集与分析系统,可以实时跟踪测量并记录三维空间内点的轨迹、刚体的运动姿态以及人体动作,空间定位精度可以达到亚毫米级。目前,在无人机室内定位、仿生机器人运动规划、机械臂示教学习、气浮台位姿验证、水下运动捕捉等领域得到广泛应用,目前已经与清华大学、中国科学技术大学、北京航空航天大学、北京理工大学、哈尔滨工业大学等高校开展合作。








